

ພວກເຮົາເປັນຫນຶ່ງໃນມືອາຊີບທີ່ສຸດ FA One-stop ສະຫນອງໃນ China.Our ຜະລິດຕະພັນຕົ້ນຕໍລວມທັງ servo motor, planetary gearbox, inverter ແລະ PLC, HMI.Brands ລວມທັງ Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron ແລະອື່ນໆ; ເວລາການຂົນສົ່ງ: ພາຍໃນ 3-5 ມື້ເຮັດວຽກຫຼັງຈາກໄດ້ຮັບການຊໍາລະເງິນ. ວິທີການຊໍາລະເງິນ: T/T, L/C, PayPal, West Union, Alipay, Wechat ແລະອື່ນໆ
ລາຍລະອຽດສະເພາະ
| ລາຍການ | ຂໍ້ມູນຈໍາເພາະ |
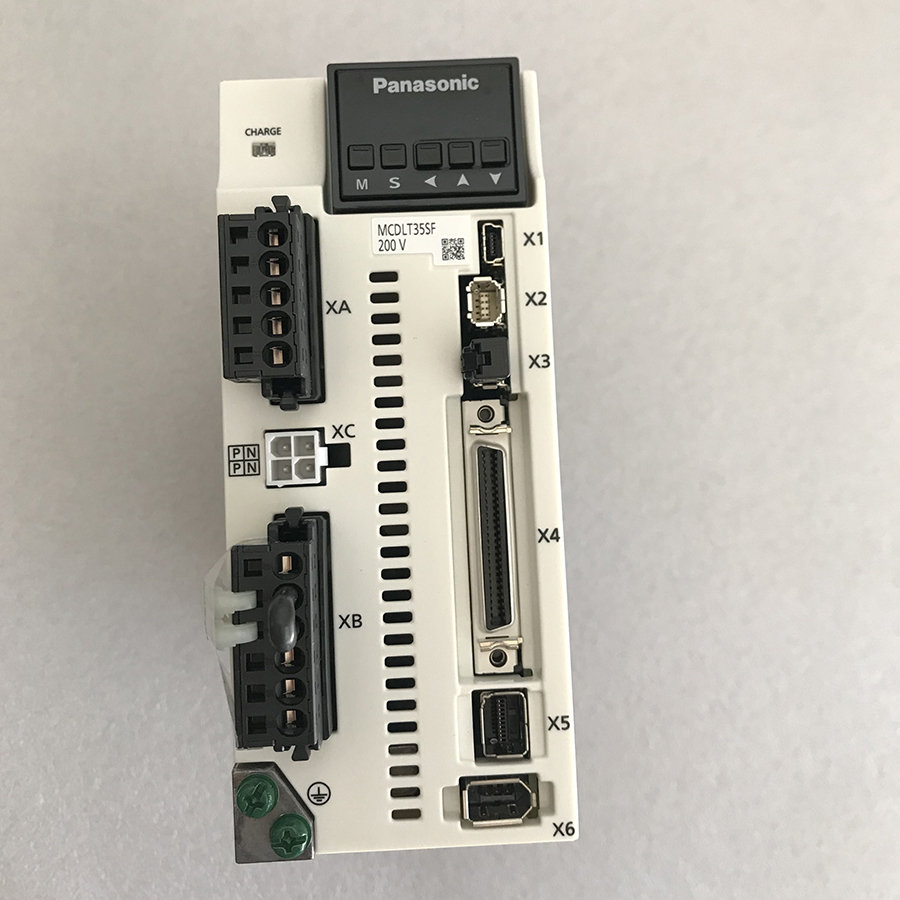
| ເລກສ່ວນ | MCDLT35SF |
| ລາຍລະອຽດ | ຊຸດ A6SF |
| ປະເພດ Multifunction (Pulse | |
| ການປຽບທຽບ | |
| ປິດເຕັມ) | |
| ກັບຫນ້າທີ່ຄວາມປອດໄພ | |
| ຊື່ຄອບຄົວ | MINAS A6 |
| ຊຸດ | ຊຸດ A6SF |
| ປະເພດ | ປະເພດ Multifunction |
| ກອບ | C-Frame |
| ການຕອບສະໜອງຄວາມຖີ່ | 3.2 kHz |
| ວິທີການຄວບຄຸມ | ການຄວບຄຸມຕໍາແໜ່ງ, ການຄວບຄຸມຄວາມໄວ, ການຄວບຄຸມແຮງບິດ, ແລະການຄວບຄຸມແບບປິດເຕັມ |
| ຟັງຊັນຄວາມປອດໄພ | ກັບ |
| ການສະຫນອງແຮງດັນ | ດຽວ / 3 ເຟດ 200 V |
| ການຈັດປະເພດ I/F ປະເພດ | ອະນາລັອກ / Pulse, Modbus (RS485 / RS232) |
| ຂະໜາດ (W) (ຫົວໜ່ວຍ: mm) | 65 |
| ຂະໜາດ (H) (ຫົວໜ່ວຍ: mm) | 150 |
| ຂະໜາດ (D) (ຫົວໜ່ວຍ: mm) | ໑໗໐ |
| ມະຫາຊົນ (ກິໂລ) | 1.6 |
| ສະພາບແວດລ້ອມ | ສໍາລັບລາຍລະອຽດເພີ່ມເຕີມ, ກະລຸນາເບິ່ງຄູ່ມືການສອນ. |
ຂໍ້ມູນຈໍາເພາະພື້ນຖານ
| ລາຍການ | ຂໍ້ມູນຈໍາເພາະ |
| ພະລັງງານ input: ວົງຈອນຕົ້ນຕໍ | ດຽວ/3 ເຟດສ 200 ຫາ 240V +10% -15% 50/60 Hz |
| ພະລັງງານ input: ວົງຈອນຄວບຄຸມ | ໄລຍະດຽວ 200 ຫາ 240V +10% -15% 50/60 Hz |
| ຄຳຕິຊົມຕົວເຂົ້າລະຫັດ | 23-bit (ຄວາມລະອຽດ 8388608) ຕົວເຂົ້າລະຫັດຢ່າງແທ້ຈິງ, 7-wire serial |
| ກ່ຽວກັບຄໍາຄຶດຄໍາເຫັນຕົວເຂົ້າລະຫັດ | * ເມື່ອໃຊ້ມັນເປັນລະບົບການເພີ່ມ (ບໍ່ໃຊ້ຂໍ້ມູນຫຼາຍລ້ຽວ), ຢ່າເຊື່ອມຕໍ່ແບດເຕີຣີສໍາລັບຕົວເຂົ້າລະຫັດຢ່າງແທ້ຈິງ. ພາລາມິເຕີ Pr. 0.15 ຕ້ອງຖືກຕັ້ງເປັນ "1" (ການຕັ້ງຄ່າໂຮງງານ). |
| ຄວາມຄິດເຫັນຂະຫນາດພາຍນອກ | ໄລຍະ A/B, ການປ້ອນຂໍ້ມູນຄວາມແຕກຕ່າງຂອງສັນຍານ homeing. ການສື່ສານ Serial ແມ່ນສະຫນັບສະຫນູນ. |
| ຕົວເຊື່ອມຕໍ່ I/O ຂະໜານ: | |
| ຄວບຄຸມສັນຍານເຂົ້າ | ຈຸດປະສົງທົ່ວໄປ 10 ວັດສະດຸປ້ອນ |
| ຟັງຊັນຂອງການປ້ອນຂໍ້ມູນທົ່ວໄປຖືກເລືອກໂດຍພາລາມິເຕີ. | |
| ຕົວເຊື່ອມຕໍ່ I/O ຂະໜານ: | |
| ຄວບຄຸມສັນຍານ Output | ຈຸດປະສົງທົ່ວໄປ 6 ຜົນຜະລິດ |
| ຫນ້າທີ່ຂອງຜົນຜະລິດທີ່ມີຈຸດປະສົງທົ່ວໄປແມ່ນເລືອກໂດຍຕົວກໍານົດການ. | |
| ຕົວເຊື່ອມຕໍ່ I/O ຂະໜານ: | |
| ການປ້ອນສັນຍານອະນາລັອກ | 3 ວັດສະດຸປ້ອນ (16-bit A/D: 1 input, 12-bit A/D: 2 inputs) |
| ຕົວເຊື່ອມຕໍ່ I/O ຂະໜານ: | |
| ສັນຍານອະນາລັອກ Output | 2 ຜົນຜະລິດ (ຈໍອະນາລັອກ: 2 ຜົນຜະລິດ) |
| ຕົວເຊື່ອມຕໍ່ I/O ຂະໜານ: | |
| ການປ້ອນສັນຍານກໍາມະຈອນ | 2 ວັດສະດຸປ້ອນ (ອິນພຸດຮູບຄູ່, ວັດສະດຸປ້ອນສາຍຮັບ) |
| ທັງສອງຕົວເກັບລວບລວມແລະຕົວເຊື່ອມຕໍ່ແບບເປີດສາຍສາມາດເຊື່ອມຕໍ່ໄດ້. | |
| ການໂຕ້ຕອບຄົນຂັບເສັ້ນຄວາມໄວສູງສາມາດເຊື່ອມຕໍ່ໄດ້. | |
| ຕົວເຊື່ອມຕໍ່ I/O ຂະໜານ: | |
| ສັນຍານກໍາມະຈອນ Output | 4 ຜົນຜະລິດ (ສາຍຂັບ: 3 output, ເປີດຕົວເກັບກໍາ: 1 output) |
| Line driver output for encoder pulses (A/B/Z signal) or external feedback pulses (EXA/EXB/EXZ signal) open collector output ຍັງມີສໍາລັບສັນຍານ Z ຫຼື EXZ. | |
| ຫນ້າທີ່ການສື່ສານ | USB, RS232, RS485, Modbus-RTU |
| ຟັງຊັນການສື່ສານ: USB | ການໂຕ້ຕອບ USB ເພື່ອເຊື່ອມຕໍ່ກັບຄອມພິວເຕີສໍາລັບການຕັ້ງຄ່າພາລາມິເຕີຫຼືການຕິດຕາມສະຖານະການ. |
| ຟັງຊັນການສື່ສານ: RS232 | ການສື່ສານ 1:1 |
| ຟັງຊັນການສື່ສານ: RS485 | 1: n ການສື່ສານ (ສູງສຸດ 31) |
| ຟັງຊັນການສື່ສານ: Modbus-RTU | 1: n ການສື່ສານ |
| ການຟື້ນຟູ | ຕົວຕ້ານທານທີ່ສ້າງຂຶ້ນໃນຕົວ (ຕົວຕ້ານທານພາຍນອກແມ່ນຍັງເປີດໃຊ້ງານ.) |
| ໂໝດຄວບຄຸມ | ການສະຫຼັບລະຫວ່າງ 7 ຮູບແບບຕໍ່ໄປນີ້ແມ່ນເປີດໃຫ້ໃຊ້ງານ, |
| (1) ການຄວບຄຸມຕໍາແຫນ່ງ, (2) ການຄວບຄຸມຄວາມໄວ, (3) ການຄວບຄຸມແຮງບິດ, (4) ການຄວບຄຸມຕໍາແຫນ່ງ / ຄວາມໄວ, (5) ການຄວບຄຸມຕໍາແຫນ່ງ / Torque, (6) ການຄວບຄຸມຄວາມໄວ / ແຮງບິດ, (7) ການຄວບຄຸມເຕັມປິດ |
ຄວາມສາມາດ Multifunctional ກົງກັບຄວາມຕ້ອງການຕ່າງໆ
◎ສະຫນັບສະຫນູນທັງຫມົດຕໍາແຫນ່ງ, ຄວາມໄວແລະທິບາຍຮູບແບບ torque (w / ການທໍາງານຂອງຕໍາແຫນ່ງໃນຕົວ).
◎ຈັບສະລັກຕໍາແຫນ່ງທີ່ມີຄວາມແມ່ນຍໍາສູງແລະການປຽບທຽບ
◎ວົງຈອນການສື່ສານສາມາດຕັ້ງຄ່າໄດ້ທຸກເວລາລະຫວ່າງ 2 ms ແລະ 62.5μs.
ເຄືອຂ່າຍງ່າຍດາຍ
◎ຕອບສະໜອງໄດ້ທັງຄວາມຕ້ອງການປະສິດທິພາບສູງ ແລະລາຄາຕໍ່າ.
◎Synchronization ສ້າງຕັ້ງຂຶ້ນໂດຍການສື່ສານ IC
◎ການພັດທະນາອຸປະກອນທີ່ເຂົ້າກັນໄດ້ງ່າຍຂຶ້ນ










